Robotics簡介
機器人技術讓機器人程序員可以模擬和驗證機器人任務。程序員可以進行可達性分析為廠間提供優化的機器人計畫。機器人程序員還可以在所有製造環境中創建、模擬和驗證機器人。機器人技術將允許精確規劃工作單元,以更高效的進行設計和優化。
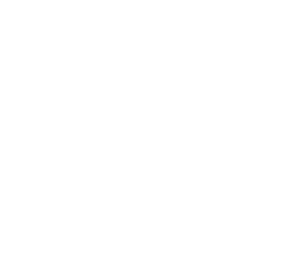
Robotics Arc Engineer 功能介紹
模擬圓弧焊robots:
● 創建與修改幾何圖形的弧焊軌跡。
● 自動計算工件定位設備的最佳接合值。
● 計算沿robot軌跡運動的標準參數,從而最佳化robot的運動。
● 根據robot的運動,創建robots或刀具的範圍路徑。
● 使用標準模式和控制器特定拘束,快速生成焊縫搜索軌跡。
● 支援設備程序中的進階邏輯及I/O,以便在機器和其他設備間創建輸入及輸出 信號。
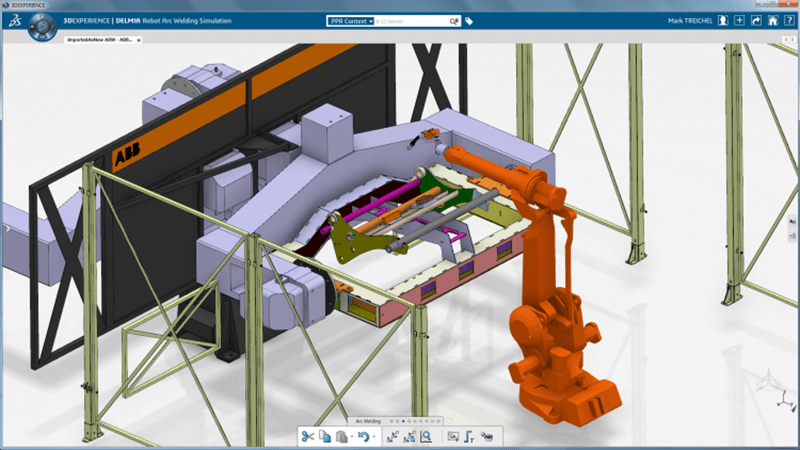
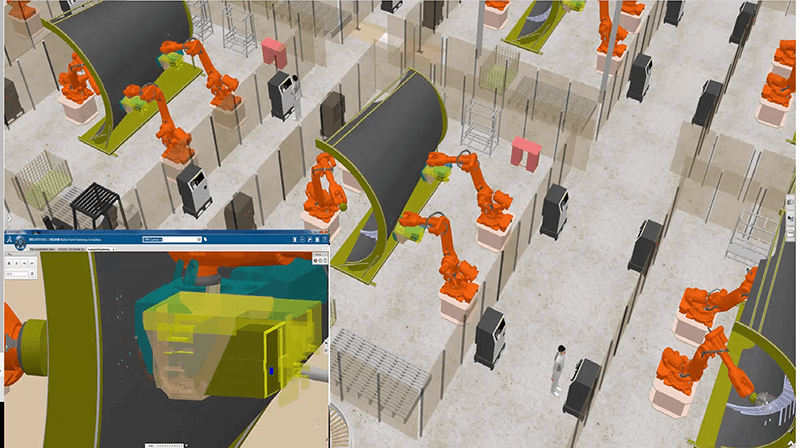
Robotics Engineer 功能介紹
模擬並驗證工業robot的行為:
● 根據robots的運動,創建robots或刀具的範圍路徑。
● 使用Realistic Robot Simulation I(RRS-I) 來提高模擬準確性。
● 依據robot的不同任務,提供使用者輕易安排機器的擺放位置。
● 通過計算轉數、機器臂配置、構台位置以及沿robots軌跡的參數值,自動優化robot的運動。
● 允許使用者在機器與其他設備間建立輸入及輸出信號,從而模擬進階邏輯與I/O。
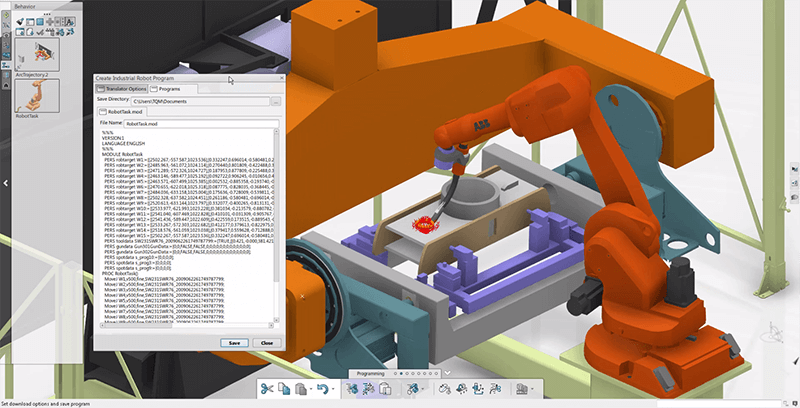
Robotics Offline Programmer 功能介紹
Import與Export robot程式:
● 依據客戶需求,使用VB.Net來開發程式。
● 藉由簡易的程式語言來開發robot的應用程式。
● 使用機器的原生程式語言來開發程式。
● 增進程式設計師與繪圖人員之間的合作。
● 從 Fanuc RJ/TPE、Motoman/Yaskawa、Nachi、Kawasaki、Panasonic、Daihen、ABB RAPID S4C/S4C+、C5、Kuka 和 Durr 中上傳和下載robots程式。
Robotics Spot Engineer 功能介紹
使用點焊、鑽孔及鉚接功能來創建並模擬robot:
● 藉由簡單易用的教學界面來提供鑽孔、鉚接以及高級編程指令。
● 模擬多個robots,其中一個robot follow另一robot的動作與行為。
● 透過計算正規的運動參數來自動優化robot的運動。
● 可使用軟體模擬真實世界中robots做各項任務的情形。
● 同時模擬多個robots,分析及確保工作中所有robots點焊的可達性。
● 假如設計變更對現有robot程式有影響的話,必須自動更新robots路徑。
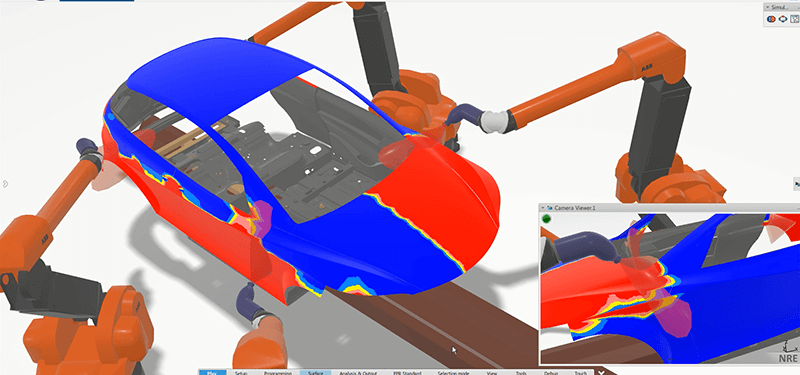
Robotics Surface Engineer 功能介紹
使用robot對曲面進行模擬、編程、驗證和優化:
● 將基於曲面精準分析的程式應用於多個robots上。
● 材料沉積的圖形展示。
● 生產線上追蹤並模擬。
● 藉由模擬得到的結果,可減少程式設計上遇到的錯誤與重複開發的問題。
● 在製造環境中創建、模擬並驗證robots。
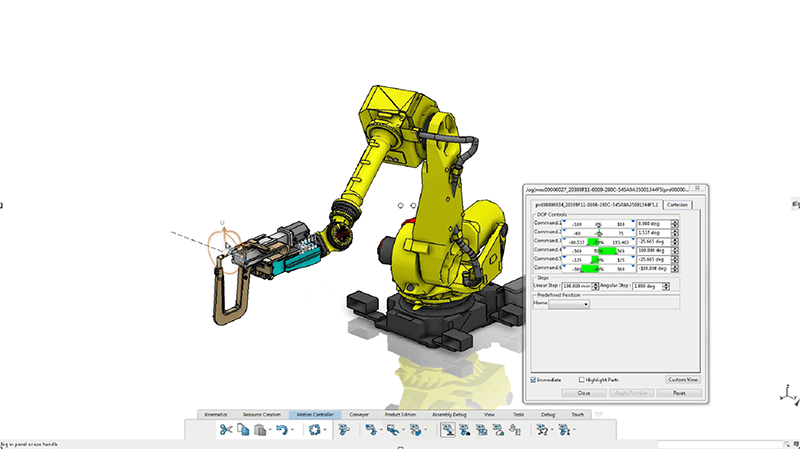
Shop Floor Equipment Engineer 功能介紹
創建製造設備虛擬模型:
● 創建虛擬增量製造機器。
● 在設計周其早期發現問題,例如干涉、行程限制和可達性不足。
● 通過少量點擊操作和直觀的命令,從零件裝配中快速創建適用的設備。
● 在整個企業中無縫的共享數據。
Shop Floor Equipment Simulation Engineer 功能介紹
模擬和驗證機械設備行為:
● 在製造環境中創建和驗證設備任務。
● 同時定義設備任務。
● 盡早找到和解決裝配設計(DFA)和製造設計(DFM)問題。
● 支持整個企業範圍內開展協同合作。
● 幫助境可能最準確地了解運動變化對任務定義的影響,從而在各種環境下支持製造流程。